
首页
> 正文
殷村镇设备伊明牌BH090A-L2-12-B1-D1-S7拐角行星式减速器
发布时间:2024-05-03 19:26:58
-D1-S7拐角行星式减速器
液位传感器,它包括浮子、磁铁、支架、线性输出的霍尔元件传感器、放大电路,霍尔元件传感器设置在支架的上部,磁铁设置在霍尔元件传感器的下方,磁铁与浮子连接;霍尔元件传感器的输出端通过放大电路与显示仪表的输入端连接。霍尔元件传感器为线性输出的霍尔元件传感器,该液位传感器输出变化的线性度好,测量精度和分辨率高。磁致伸缩液位传感器它是由变送器、传感器和浮子组成,变送器壳体的内部装有电路板支架、电路板(22),绝缘板(28)、上端阻尼压板(29)、上端阻尼(16)和电路板支架固定在一起,钢弦(15)从上端阻尼(16)中间穿过,钢弦(15)压在压电陶瓷(17)上,压电陶瓷(17)通过引线与电路板(22)连接,传感器外管内有铝槽,询问电脉冲回路引线(19)穿过铝槽与电路板(22)相连,传感器外管下端内有绝缘固定套,下端阻尼(18)、钢弦拉紧簧和钢弦下端固定轴,传感器外管中间装有滑动连接的浮子(227)。
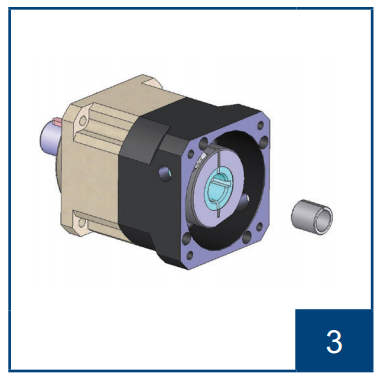
殷村镇设备:伊明牌BH090A-L2-12-B1-D1-S7拐角行星式减速器
行星减速机的工作原理是由一个内齿圈紧密结合于齿轮箱壳体上,环齿中心有一个自外部动力所驱动太阳轮,介于两者之间有一组由三颗齿轮等分组合于托盘上之行星齿轮组该组行星齿轮依靠着出力轴、内齿圈及太阳轮支撑浮游于期间;行星减速机当入力侧动力驱动太阳轮时,可带动行星齿轮自转,并依循着内齿圈之轨迹沿着中心公转,游星之旋转带动连结于行星架出力轴输出动力。根据其工作原理来说行星减速机不具备自锁功能。
殷村镇设备:伊明牌BH090A-L2-12-B1-D1-S7拐角行星式减速器
‘(齿形的修形众所周知,一对齿轮啮合时,从始啮合到脱离啮合状态,载荷是变化的,特别是轮齿工作的中部是对轮齿交替工作,工作不平稳,因此有必要对轮齿进行齿形修形,通过对齿顶、齿根的修缘,使轮齿的啮合从修缘区平滑地过渡到理论的渐线的齿形区,从而提高啮合质量。
修形的一般方法计算出齿轮的端面重合度通常说来,齿轮轮齿修形后其重合度不应小于,以保证齿轮啮合的平稳性,如果仅有一对轮齿啮合时‘即重合度(,就不应进行修缘,这是因为在单齿啮合状态,对渐线的偏离只会助长振动的发生。如当重合度接近时,修缘末端可接近节圆位置,因此须计算出齿轮的端面重合度,并根据重合度大小来确定自己的设计齿形。
为了使行星轮间载荷分布均匀,有多种多样的均载方法。对于主要靠机械的方法来实现均载的系统,其结构类型可分为两种:
1、静定系统
该系统的均载原理是通过系统中附加的自由度来实现均载的。
2、静不定系统
均载机构:
1、基本构件浮动的均载机构
(1) 中心轮a浮动 (2)内齿轮b浮动 (3)转臂H浮动 (4)中心轮a与转臂H同时浮动 (5)中心轮a与内齿轮b同时浮动 (6)组成静定结构的浮动
2、杠杆联动均载机构
本次所设计行星齿轮是静定系统,基本构件中心轮a浮动的均载机构。
殷村镇设备:伊明牌BH090A-L2-12-B1-D1-S7拐角行星式减速器
-19HB19
3-19FB19
-K3-19FB19 3-38JA32
-K3-38JA32 3-28HA28
-K3-28HA28 3-28FC24
-K3-28FC24 3-28KA22
-K3-28KA22 K3-14BJ11
更可贵的是高温时不流淌,低温时不脆裂。在常用的建筑领域优势:1.对建筑物主体结构进行保护,延长建筑物寿命。由于外保温是将保温层置于结构外侧,降低了由于温度变化导致的结构变形产生的应力,并